ロボットハンドツール「柔軟指」の研究・開発を行うKiQ Robotics株式会社との共同開発開始について
製品情報
当社はこの度、産業用ロボットに関する機器の研究・開発を行うKiQ Robotics株式会社(本社:福岡県北九州市、代表取締役:滝本 隆 以下、KiQ Robotics)と、ロボットハンドツール「柔軟指」の共同開発を開始することをお知らせいたします。
柔軟指とは
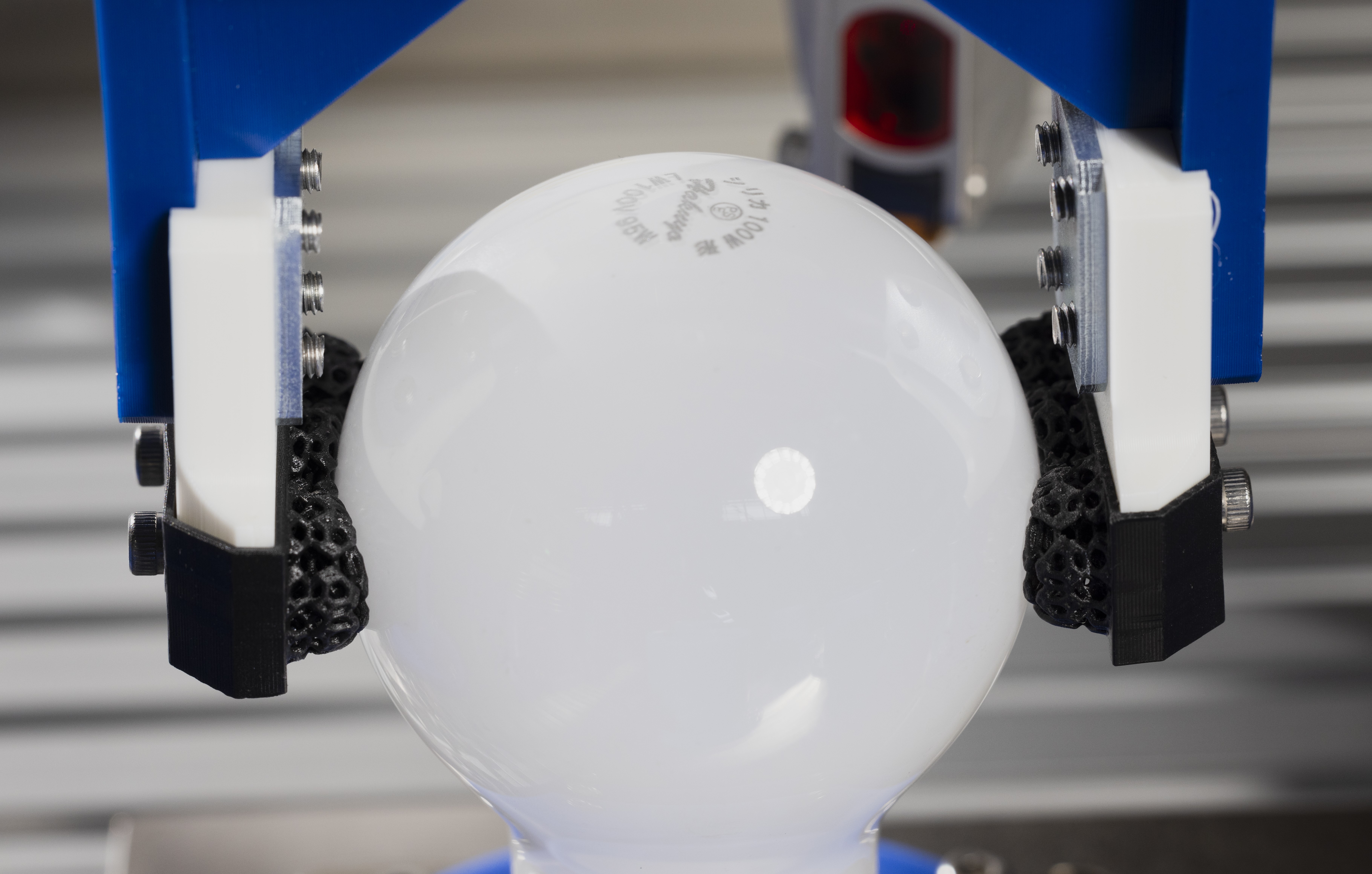
柔軟指は、3Dプリンターで作ったラティス構造の樹脂に柔軟性を持たせたロボットハンドツールです。ロボットなどのチャックツメに柔軟指を取り付けることで、指で優しく包み込むように対象物を安定して掴むことが可能です。様々な形状を掴むことができるため、「ツールチェンジ(段取り換え)」の工数削減を実現できます。
共同開発の内容
当社は長期経営計画「LV2030」において、様々な顧客・仕入先・大学・ベンチャー企業などと協力してソリューションを創り上げる”協創”をキーワードに掲げています。当社とKiQ Roboticsの以下の強みを掛け合わせることで、従来品以上に産業界に貢献できる「柔軟指」を開発していきます。
【KiQ Robotics】ロボットハンドツール「柔軟指」をはじめ、産業用ロボットに関する機器の研究・開発・技術力
【リックス】創業116年で培ってきた鉄鋼、自動車、電子・半導体など幅広い産業界の知見と営業力
【共同開発する「柔軟指」の想定顧客】
主には自動車業界向けの予定ですが、開発を進める中で、様々な業界向けに提案していく予定です。
柔軟指の特徴(ラティス構造「柔軟指」3つの特徴/強み)

Point 01 複雑な形状も柔らかく・しっかりキャッチ
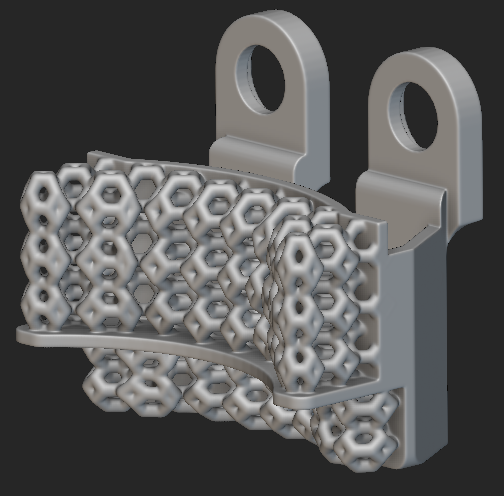
ラティス構造により、様々な形状をチャック可能です。ラティス構造とは、枝状に分かれた格子を周期的に並べて立体化したもので、複雑な形状を掴む時にもその形に変形して包み込むように持ち上げてくれます。
Point 02 高い耐久性で長持ち
一般的に、突起などのある対象物を掴むロボットハンドの素材としてはゲルやスポンジなどがあります。それらと比べると、ラティス構造の柔軟指は、強度のある素材を使って、構造によって変形を適切に調整し「やわらかさ」を実現しているので、高い耐久性能が期待できます。
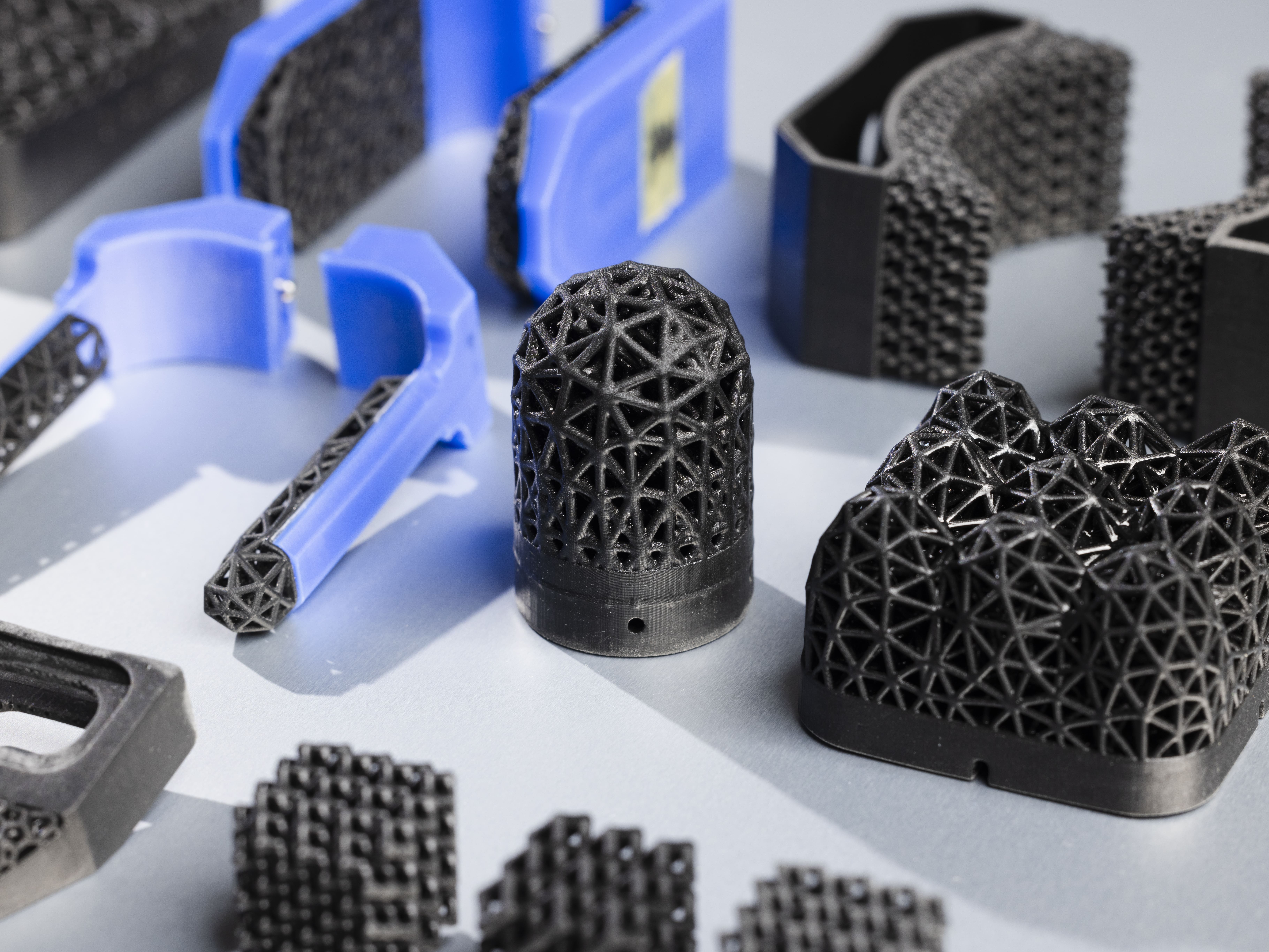
Point 03 3Dプリンター活用による設計自由度の高さ
ゲルやスポンジなどの柔らかい素材は加工が難しく、任意の形状を得ることが困難です。また、試作・検証の段階から金型を用いた樹脂成形は高コストとなってしまいます。一方、ラティス構造の柔軟指は3Dプリンターにて成形するため、設計自由度が高く、様々な形状で製造可能です。
導入例:当社福岡事業所(工場)で柔軟指を導入した効果

当社は、福岡県糟屋郡にある工場で自社製品の「ロータリージョイント(回転継手)」を製造しています。研削工程において柔軟指を導入し実証試験を行ったところ、1日に数回~10回ほど発生していたチャックミスによるチョコ停を、ゼロにすることができました。※効果は各社の仕様により異なります。
第8回 ロボデックス 東京 出展のお知らせ
当社は、2024年1月24~26日に開催される「第8回 ロボデックス 東京」で、「柔軟指」をご紹介します。ご来場の上、ぜひ当社ブースにお立ち寄り頂けますと幸いです。
イベント名:第8回 ロボデックス 東京
会 期:2024年1月24日(水)~26日(金) 10:00~17:00
会 場:東京ビッグサイト 西展示棟
当社ブース:W53-70
